
Malintha Fernando
Postdoctoral Researcher
KTH Royal Institute of Technology, Sweden

I am a Digital Futures Postdoctoral Fellow at the KTH Royal Institute of Technlogy, Sweden. My research lies at the intersection of deep reinforcement learning, multi-agent systems, and game theory.
My current research revolves around: (1) designing RL methods to learn distributed, sequential decision-making policies to solve robotics planning problems (i.e., vehicle routing, prize-collection), (2) studying mixed-motive interactions in such combinatorial problems (e.g., agents competing for prizes, routes) (3) allocating the rewards optimally to achieve social optimum in such settings (what policies will maximize the profits of the competing coalitions, while providing the best services)?
Answering these questions will enable autonomous fleet managers make optimal, sequential, decisions in a distributed manner under both competitive, and cooperative settings. E.g., given the observations about the competitors, and the own fleet, which depot should each vehicle cover?
From a policy-making perspective it will allow predicting which areas will be underserved by the service providers in pursuit of profit. How much should we tax/incentivize the providers for fairer service distribution?
My current research is a natual extension of my Ph.D., in which I researched trajectory planning in drone swarms for parcel delivery, formation control, under partial observations. I am advised by Prof. Silun Zhang (KTH Mathematics), and Prof. Petter Ögren (EECS). Before joining KTH, I briefly worked as a machine learning lecturer at Indiana University, Bloomington, USA, where I obtained my Ph.D.
I am currently looking for positions related to robotics, and deep learning in Sweden.
News
| Mar, 2026 | We organized the Digital Futures Young Scientists Conference, 2026. It was a fantastic day at Stockholm with some very intersting Keynotes. Read the newstory published on the DF official website here. |
|---|---|
| Feb, 2026 | Can counterfactuals speed up learning RL policies to solve decision-making problems on graphs? We cetainly think so. A paper is in the making. |
| Nov, 2025 | Presented our work “Competing Collaborators: Strategic Planning on Graphs” at “Digitalize i Stockholm 2025” |
| Oct, 2025 | A preprint is out. We propose the concept of “Ordinal-Rank Conditioning” to improve reinforcement learning agents making-decisions on graphs under rank-based conflict resolution rules. Arxiv |
| Jul, 2025 | I have spent the past few months studying the problem which we refer to as the “Stochastic Prize-Collecting Games”. We have obtained insteresting results with a fictitious-play-based learning mechanism in the presence of rank-based agents. Await for our preprint. |
Selected Research Projects
For an updated list, please visit my google scholar page.
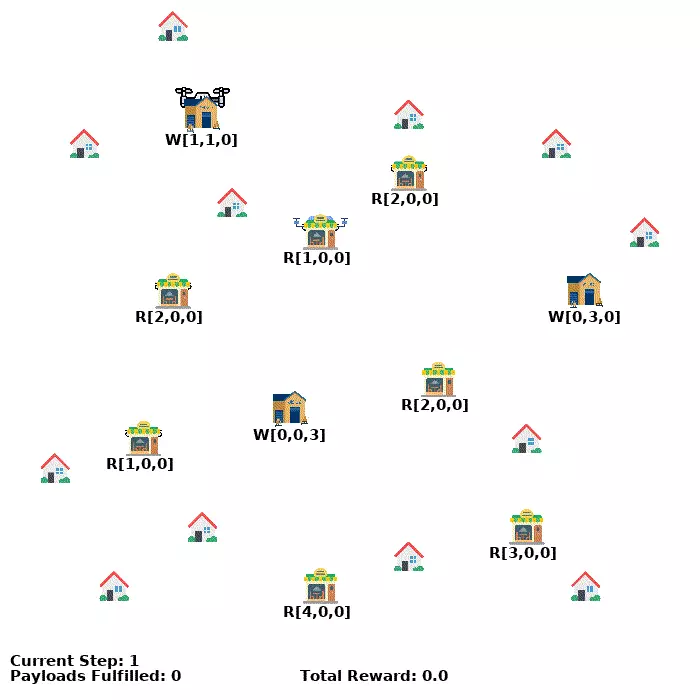
Graph Attention Aerial Fleet Coordination
This work propose a multi-step partially-observable stochastic game formulation for coordinating fully-autonomous heterogeneous eVTOL fleet with graph-attention multi-agent reinforcement-learning (MARL). The paper got accepted to Robotics: Science and Systems, 2023 . [Paper].
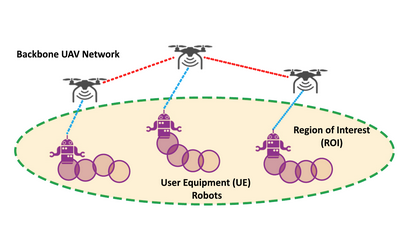
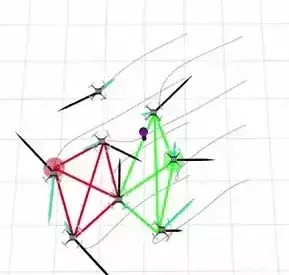
Graphical Game-Theoretic Communication-Aware Coverage
Wireless communication plays a crucial role in distributed coordination control of robot swarms. In this work we propose a robust, real-time coverage control approach for UAV swarms to provide the wireless coverage for a ground robot team using a UAV team operating over large geographic region with the local communication. The two images show a static and mobile ground robot team, where the UAV fleet is changing their formation to maximize the coverage for the ground robots. The dynamic communication links among the UAVs are shown in grey.
Checkout the full demo on Youtube .


Real-Time Distributed Flocking Control
Murmurations are one of the most beatiful natural phenomena in the world, and characterizes the perfect swarm . In this work I tried to recreate the flocking characteristics UAVs using a variational inference approach in a distributed manner. The drones only uses their local observations to infer the control actions from feasible set; which makes this approach unique compared to the literature which we can guarantee the covergence and the dynamical feasibility.
Checkout the full demo on Youtube .


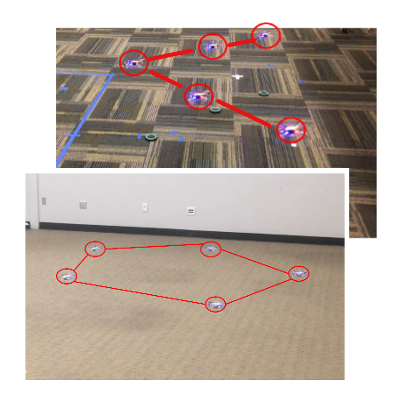
Multi-UAV Formation Control
Drone formation control has been gaining a lot of attention lately with applications ranging from entertainment to and defense industries. In this work I propose a rigid-body-based formation controlling approach with drone aggressive trajectory generation. The drones showed the ability to move at 2.5ms-1 (over 10 body-lengths a second) in a user defined formation with real-time receding horizon trajectory planning.
Checkout the formation control demo on Youtube .
Checkout the minimum-jerk trajectory generation demo on Youtube .


Selected Publications
-
 Graph Attention Multi-Agent Fleet Autonomy for Advanced Air Mobility2023
Graph Attention Multi-Agent Fleet Autonomy for Advanced Air Mobility2023 -
 CoCo Games: Graphical Game-Theoretic Swarm Control for Communication-Aware CoverageIEEE Robotics and Automation Letters, 2022
CoCo Games: Graphical Game-Theoretic Swarm Control for Communication-Aware CoverageIEEE Robotics and Automation Letters, 2022 -
 Online flocking control of UAVs with mean-field approximationIn 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
Online flocking control of UAVs with mean-field approximationIn 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021 -
 Formation control and navigation of a quadrotor swarmIn 2019 International Conference on Unmanned Aircraft Systems (ICUAS), 2019
Formation control and navigation of a quadrotor swarmIn 2019 International Conference on Unmanned Aircraft Systems (ICUAS), 2019



